Building a Simple To-Do App
After we have learned so many concepts, it is finally time to put them into practice. We are going to build a To-Do app!
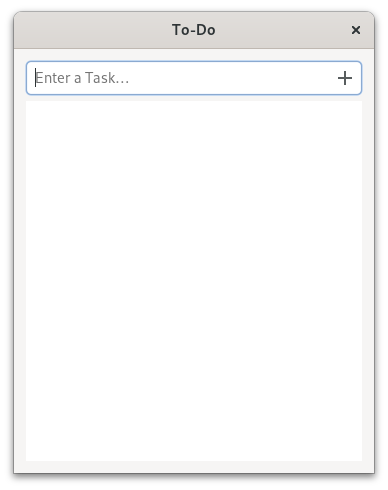
For now, we would already be satisfied with a minimal version. An entry to input new tasks and a list view to display them will suffice. Something like this:
Window
This mockup can be described by the following composite template.
Filename: listings/todo/1/resources/window.ui
<?xml version="1.0" encoding="UTF-8"?>
<interface>
<template class="TodoWindow" parent="GtkApplicationWindow">
<property name="width-request">360</property>
<property name="title" translatable="yes">To-Do</property>
<child>
<object class="GtkBox">
<property name="orientation">vertical</property>
<property name="margin-top">12</property>
<property name="margin-bottom">12</property>
<property name="margin-start">12</property>
<property name="margin-end">12</property>
<property name="spacing">6</property>
<child>
<object class="GtkEntry" id="entry">
<property name="placeholder-text" translatable="yes">Enter a Task…</property>
<property name="secondary-icon-name">list-add-symbolic</property>
</object>
</child>
<child>
<object class="GtkScrolledWindow">
<property name="hscrollbar-policy">never</property>
<property name="min-content-height">360</property>
<property name="vexpand">true</property>
<child>
<object class="GtkListView" id="tasks_list">
<property name="valign">start</property>
</object>
</child>
</object>
</child>
</object>
</child>
</template>
</interface>
In order to use the composite template, we create a custom widget.
The parent is gtk::ApplicationWindow, so we inherit from it.
As usual, we have to list all ancestors and interfaces apart from GObject and GInitiallyUnowned.
Filename: listings/todo/1/window/mod.rs
mod imp;
use glib::{Object, clone};
use gtk::subclass::prelude::*;
use gtk::{Application, NoSelection, SignalListItemFactory, gio, glib};
use gtk::{ListItem, prelude::*};
use crate::task_object::TaskObject;
use crate::task_row::TaskRow;
glib::wrapper! {
pub struct Window(ObjectSubclass<imp::Window>)
@extends gtk::ApplicationWindow, gtk::Window, gtk::Widget,
@implements gio::ActionGroup, gio::ActionMap, gtk::Accessible, gtk::Buildable,
gtk::ConstraintTarget, gtk::Native, gtk::Root, gtk::ShortcutManager;
}
impl Window {
pub fn new(app: &Application) -> Self {
// Create new window
Object::builder().property("application", app).build()
}
fn tasks(&self) -> gio::ListStore {
// Get state
self.imp()
.tasks
.borrow()
.clone()
.expect("Could not get current tasks.")
}
fn setup_tasks(&self) {
// Create new model
let model = gio::ListStore::new::<TaskObject>();
// Get state and set model
self.imp().tasks.replace(Some(model));
// Wrap model with selection and pass it to the list view
let selection_model = NoSelection::new(Some(self.tasks()));
self.imp().tasks_list.set_model(Some(&selection_model));
}
fn setup_callbacks(&self) {
// Setup callback for activation of the entry
self.imp().entry.connect_activate(clone!(
#[weak(rename_to = window)]
self,
move |_| {
window.new_task();
}
));
// Setup callback for clicking (and the releasing) the icon of the entry
self.imp().entry.connect_icon_release(clone!(
#[weak(rename_to = window)]
self,
move |_, _| {
window.new_task();
}
));
}
fn new_task(&self) {
// Get content from entry and clear it
let buffer = self.imp().entry.buffer();
let content = buffer.text().to_string();
if content.is_empty() {
return;
}
buffer.set_text("");
// Add new task to model
let task = TaskObject::new(false, content);
self.tasks().append(&task);
}
fn setup_factory(&self) {
// Create a new factory
let factory = SignalListItemFactory::new();
// Create an empty `TaskRow` during setup
factory.connect_setup(move |_, list_item| {
// Create `TaskRow`
let task_row = TaskRow::new();
list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.set_child(Some(&task_row));
});
// Tell factory how to bind `TaskRow` to a `TaskObject`
factory.connect_bind(move |_, list_item| {
// Get `TaskObject` from `ListItem`
let task_object = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.item()
.and_downcast::<TaskObject>()
.expect("The item has to be an `TaskObject`.");
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.bind(&task_object);
});
// Tell factory how to unbind `TaskRow` from `TaskObject`
factory.connect_unbind(move |_, list_item| {
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.unbind();
});
// Set the factory of the list view
self.imp().tasks_list.set_factory(Some(&factory));
}
}Then we initialize the composite template for imp::Window.
We store references to the entry, the list view as well as the list model.
This will come in handy when we later add methods to our window.
After that, we add the typical boilerplate for initializing composite templates.
We only have to assure that the class attribute of the template in window.ui matches NAME.
Filename: listings/todo/1/window/imp.rs
use std::cell::RefCell;
use glib::subclass::InitializingObject;
use gtk::subclass::prelude::*;
use gtk::{CompositeTemplate, Entry, ListView, gio, glib};
// Object holding the state
#[derive(CompositeTemplate, Default)]
#[template(resource = "/org/gtk_rs/Todo1/window.ui")]
pub struct Window {
#[template_child]
pub entry: TemplateChild<Entry>,
#[template_child]
pub tasks_list: TemplateChild<ListView>,
pub tasks: RefCell<Option<gio::ListStore>>,
}
// The central trait for subclassing a GObject
#[glib::object_subclass]
impl ObjectSubclass for Window {
// `NAME` needs to match `class` attribute of template
const NAME: &'static str = "TodoWindow";
type Type = super::Window;
type ParentType = gtk::ApplicationWindow;
fn class_init(klass: &mut Self::Class) {
klass.bind_template();
}
fn instance_init(obj: &InitializingObject<Self>) {
obj.init_template();
}
}
// Trait shared by all GObjects
impl ObjectImpl for Window {
fn constructed(&self) {
// Call "constructed" on parent
self.parent_constructed();
// Setup
let obj = self.obj();
obj.setup_tasks();
obj.setup_callbacks();
obj.setup_factory();
}
}
// Trait shared by all widgets
impl WidgetImpl for Window {}
// Trait shared by all windows
impl WindowImpl for Window {}
// Trait shared by all application windows
impl ApplicationWindowImpl for Window {}main.rs also does not hold any surprises for us.
Filename: listings/todo/1/main.rs
mod task_object;
mod task_row;
mod window;
use gtk::prelude::*;
use gtk::{Application, gio, glib};
use window::Window;
fn main() -> glib::ExitCode {
// Register and include resources
gio::resources_register_include!("todo_1.gresource")
.expect("Failed to register resources.");
// Create a new application
let app = Application::builder()
.application_id("org.gtk_rs.Todo1")
.build();
// Connect to "activate" signal of `app`
app.connect_activate(build_ui);
// Run the application
app.run()
}
fn build_ui(app: &Application) {
// Create a new custom window and present it
let window = Window::new(app);
window.present();
}Finally, we specify our resources.
Here, they already include task_row.ui which we will handle later in this chapter.
Filename: listings/todo/1/resources/resources.gresource.xml
<?xml version="1.0" encoding="UTF-8"?>
<gresources>
<gresource prefix="/org/gtk_rs/Todo1/">
<file compressed="true" preprocess="xml-stripblanks">task_row.ui</file>
<file compressed="true" preprocess="xml-stripblanks">window.ui</file>
</gresource>
</gresources>
Task Object
So far so good. The main user interface is done, but the entry does not react to input yet. Also, where would the input go? We haven’t even set up the list model yet. Let’s do that!
As discussed in the list widgets chapter, we start out by creating a custom GObject. This object will store the state of the task consisting of:
- a boolean describing whether the task is completed or not, and
- a string holding the task name.
Filename: listings/todo/1/task_object/mod.rs
mod imp;
use glib::Object;
use gtk::glib;
glib::wrapper! {
pub struct TaskObject(ObjectSubclass<imp::TaskObject>);
}
impl TaskObject {
pub fn new(completed: bool, content: String) -> Self {
Object::builder()
.property("completed", completed)
.property("content", content)
.build()
}
}
#[derive(Default)]
pub struct TaskData {
pub completed: bool,
pub content: String,
}Unlike the lists chapter, the state is stored in a struct rather than in individual members of imp::TaskObject.
This will be very convenient when saving the state in one of the following chapters.
Filename: listings/todo/1/task_object/mod.rs
mod imp;
use glib::Object;
use gtk::glib;
glib::wrapper! {
pub struct TaskObject(ObjectSubclass<imp::TaskObject>);
}
impl TaskObject {
pub fn new(completed: bool, content: String) -> Self {
Object::builder()
.property("completed", completed)
.property("content", content)
.build()
}
}
#[derive(Default)]
pub struct TaskData {
pub completed: bool,
pub content: String,
}We are going to expose completed and content as properties.
Since the data is now inside a struct rather than individual member variables we have to add more annotations.
For each property we additionally specify the name, the type and which member variable of TaskData we want to access.
Filename: listings/todo/1/task_object/imp.rs
use std::cell::RefCell;
use glib::Properties;
use gtk::glib;
use gtk::prelude::*;
use gtk::subclass::prelude::*;
use super::TaskData;
// Object holding the state
#[derive(Properties, Default)]
#[properties(wrapper_type = super::TaskObject)]
pub struct TaskObject {
#[property(name = "completed", get, set, type = bool, member = completed)]
#[property(name = "content", get, set, type = String, member = content)]
pub data: RefCell<TaskData>,
}
// The central trait for subclassing a GObject
#[glib::object_subclass]
impl ObjectSubclass for TaskObject {
const NAME: &'static str = "TodoTaskObject";
type Type = super::TaskObject;
}
// Trait shared by all GObjects
#[glib::derived_properties]
impl ObjectImpl for TaskObject {}Task Row
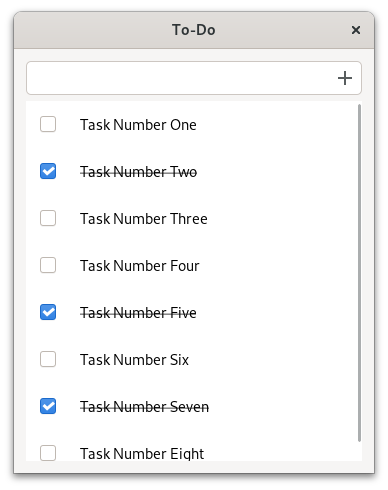
Let’s move on to the individual tasks. The row of a task should look like this:

Again, we describe the mockup with a composite template.
Filename: listings/todo/1/resources/task_row.ui
<?xml version="1.0" encoding="UTF-8"?>
<interface>
<template class="TodoTaskRow" parent="GtkBox">
<child>
<object class="GtkCheckButton" id="completed_button">
<property name="margin-top">12</property>
<property name="margin-bottom">12</property>
<property name="margin-start">12</property>
<property name="margin-end">12</property>
</object>
</child>
<child>
<object class="GtkLabel" id="content_label">
<property name="margin-top">12</property>
<property name="margin-bottom">12</property>
<property name="margin-start">12</property>
<property name="margin-end">12</property>
</object>
</child>
</template>
</interface>
In the code, we derive TaskRow from gtk:Box:
Filename: listings/todo/1/task_row/mod.rs
mod imp;
use glib::Object;
use gtk::prelude::*;
use gtk::subclass::prelude::*;
use gtk::{glib, pango};
use pango::{AttrInt, AttrList};
use crate::task_object::TaskObject;
glib::wrapper! {
pub struct TaskRow(ObjectSubclass<imp::TaskRow>)
@extends gtk::Box, gtk::Widget,
@implements gtk::Accessible, gtk::Buildable, gtk::ConstraintTarget, gtk::Orientable;
}
impl Default for TaskRow {
fn default() -> Self {
Self::new()
}
}
impl TaskRow {
pub fn new() -> Self {
Object::builder().build()
}
pub fn bind(&self, task_object: &TaskObject) {
// Get state
let completed_button = self.imp().completed_button.get();
let content_label = self.imp().content_label.get();
let mut bindings = self.imp().bindings.borrow_mut();
// Bind `task_object.completed` to `task_row.completed_button.active`
let completed_button_binding = task_object
.bind_property("completed", &completed_button, "active")
.bidirectional()
.sync_create()
.build();
// Save binding
bindings.push(completed_button_binding);
// Bind `task_object.content` to `task_row.content_label.label`
let content_label_binding = task_object
.bind_property("content", &content_label, "label")
.sync_create()
.build();
// Save binding
bindings.push(content_label_binding);
// Bind `task_object.completed` to `task_row.content_label.attributes`
let content_label_binding = task_object
.bind_property("completed", &content_label, "attributes")
.sync_create()
.transform_to(|_, active| {
let attribute_list = AttrList::new();
if active {
// If "active" is true, content of the label will be strikethrough
let attribute = AttrInt::new_strikethrough(true);
attribute_list.insert(attribute);
}
Some(attribute_list.to_value())
})
.build();
// Save binding
bindings.push(content_label_binding);
}
pub fn unbind(&self) {
// Unbind all stored bindings
for binding in self.imp().bindings.borrow_mut().drain(..) {
binding.unbind();
}
}
}In imp::TaskRow, we hold references to completed_button and content_label.
We also store a mutable vector of bindings.
Why we need that will become clear as soon as we get to bind the state of TaskObject to the corresponding TaskRow.
Filename: listings/todo/1/task_row/imp.rs
use std::cell::RefCell;
use glib::Binding;
use gtk::subclass::prelude::*;
use gtk::{CheckButton, CompositeTemplate, Label, glib};
// Object holding the state
#[derive(Default, CompositeTemplate)]
#[template(resource = "/org/gtk_rs/Todo1/task_row.ui")]
pub struct TaskRow {
#[template_child]
pub completed_button: TemplateChild<CheckButton>,
#[template_child]
pub content_label: TemplateChild<Label>,
// Vector holding the bindings to properties of `TaskObject`
pub bindings: RefCell<Vec<Binding>>,
}
// The central trait for subclassing a GObject
#[glib::object_subclass]
impl ObjectSubclass for TaskRow {
// `NAME` needs to match `class` attribute of template
const NAME: &'static str = "TodoTaskRow";
type Type = super::TaskRow;
type ParentType = gtk::Box;
fn class_init(klass: &mut Self::Class) {
klass.bind_template();
}
fn instance_init(obj: &glib::subclass::InitializingObject<Self>) {
obj.init_template();
}
}
// Trait shared by all GObjects
impl ObjectImpl for TaskRow {}
// Trait shared by all widgets
impl WidgetImpl for TaskRow {}
// Trait shared by all boxes
impl BoxImpl for TaskRow {}Now we can bring everything together.
We override the imp::Window::constructed in order to set up window contents at the time of its construction.
Filename: listings/todo/1/window/imp.rs
use std::cell::RefCell;
use glib::subclass::InitializingObject;
use gtk::subclass::prelude::*;
use gtk::{CompositeTemplate, Entry, ListView, gio, glib};
// Object holding the state
#[derive(CompositeTemplate, Default)]
#[template(resource = "/org/gtk_rs/Todo1/window.ui")]
pub struct Window {
#[template_child]
pub entry: TemplateChild<Entry>,
#[template_child]
pub tasks_list: TemplateChild<ListView>,
pub tasks: RefCell<Option<gio::ListStore>>,
}
// The central trait for subclassing a GObject
#[glib::object_subclass]
impl ObjectSubclass for Window {
// `NAME` needs to match `class` attribute of template
const NAME: &'static str = "TodoWindow";
type Type = super::Window;
type ParentType = gtk::ApplicationWindow;
fn class_init(klass: &mut Self::Class) {
klass.bind_template();
}
fn instance_init(obj: &InitializingObject<Self>) {
obj.init_template();
}
}
// Trait shared by all GObjects
impl ObjectImpl for Window {
fn constructed(&self) {
// Call "constructed" on parent
self.parent_constructed();
// Setup
let obj = self.obj();
obj.setup_tasks();
obj.setup_callbacks();
obj.setup_factory();
}
}
// Trait shared by all widgets
impl WidgetImpl for Window {}
// Trait shared by all windows
impl WindowImpl for Window {}
// Trait shared by all application windows
impl ApplicationWindowImpl for Window {}Since we need to access the list model quite often, we add the convenience method Window::tasks for that.
In Window::setup_tasks we create a new model.
Then we store a reference to the model in imp::Window as well as in gtk::ListView.
Filename: listings/todo/1/window/mod.rs
mod imp;
use glib::{Object, clone};
use gtk::subclass::prelude::*;
use gtk::{Application, NoSelection, SignalListItemFactory, gio, glib};
use gtk::{ListItem, prelude::*};
use crate::task_object::TaskObject;
use crate::task_row::TaskRow;
glib::wrapper! {
pub struct Window(ObjectSubclass<imp::Window>)
@extends gtk::ApplicationWindow, gtk::Window, gtk::Widget,
@implements gio::ActionGroup, gio::ActionMap, gtk::Accessible, gtk::Buildable,
gtk::ConstraintTarget, gtk::Native, gtk::Root, gtk::ShortcutManager;
}
impl Window {
pub fn new(app: &Application) -> Self {
// Create new window
Object::builder().property("application", app).build()
}
fn tasks(&self) -> gio::ListStore {
// Get state
self.imp()
.tasks
.borrow()
.clone()
.expect("Could not get current tasks.")
}
fn setup_tasks(&self) {
// Create new model
let model = gio::ListStore::new::<TaskObject>();
// Get state and set model
self.imp().tasks.replace(Some(model));
// Wrap model with selection and pass it to the list view
let selection_model = NoSelection::new(Some(self.tasks()));
self.imp().tasks_list.set_model(Some(&selection_model));
}
fn setup_callbacks(&self) {
// Setup callback for activation of the entry
self.imp().entry.connect_activate(clone!(
#[weak(rename_to = window)]
self,
move |_| {
window.new_task();
}
));
// Setup callback for clicking (and the releasing) the icon of the entry
self.imp().entry.connect_icon_release(clone!(
#[weak(rename_to = window)]
self,
move |_, _| {
window.new_task();
}
));
}
fn new_task(&self) {
// Get content from entry and clear it
let buffer = self.imp().entry.buffer();
let content = buffer.text().to_string();
if content.is_empty() {
return;
}
buffer.set_text("");
// Add new task to model
let task = TaskObject::new(false, content);
self.tasks().append(&task);
}
fn setup_factory(&self) {
// Create a new factory
let factory = SignalListItemFactory::new();
// Create an empty `TaskRow` during setup
factory.connect_setup(move |_, list_item| {
// Create `TaskRow`
let task_row = TaskRow::new();
list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.set_child(Some(&task_row));
});
// Tell factory how to bind `TaskRow` to a `TaskObject`
factory.connect_bind(move |_, list_item| {
// Get `TaskObject` from `ListItem`
let task_object = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.item()
.and_downcast::<TaskObject>()
.expect("The item has to be an `TaskObject`.");
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.bind(&task_object);
});
// Tell factory how to unbind `TaskRow` from `TaskObject`
factory.connect_unbind(move |_, list_item| {
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.unbind();
});
// Set the factory of the list view
self.imp().tasks_list.set_factory(Some(&factory));
}
}We also create a method new_task which takes the content of the entry, clears the entry and uses the content to create a new task.
Filename: listings/todo/1/window/mod.rs
mod imp;
use glib::{Object, clone};
use gtk::subclass::prelude::*;
use gtk::{Application, NoSelection, SignalListItemFactory, gio, glib};
use gtk::{ListItem, prelude::*};
use crate::task_object::TaskObject;
use crate::task_row::TaskRow;
glib::wrapper! {
pub struct Window(ObjectSubclass<imp::Window>)
@extends gtk::ApplicationWindow, gtk::Window, gtk::Widget,
@implements gio::ActionGroup, gio::ActionMap, gtk::Accessible, gtk::Buildable,
gtk::ConstraintTarget, gtk::Native, gtk::Root, gtk::ShortcutManager;
}
impl Window {
pub fn new(app: &Application) -> Self {
// Create new window
Object::builder().property("application", app).build()
}
fn tasks(&self) -> gio::ListStore {
// Get state
self.imp()
.tasks
.borrow()
.clone()
.expect("Could not get current tasks.")
}
fn setup_tasks(&self) {
// Create new model
let model = gio::ListStore::new::<TaskObject>();
// Get state and set model
self.imp().tasks.replace(Some(model));
// Wrap model with selection and pass it to the list view
let selection_model = NoSelection::new(Some(self.tasks()));
self.imp().tasks_list.set_model(Some(&selection_model));
}
fn setup_callbacks(&self) {
// Setup callback for activation of the entry
self.imp().entry.connect_activate(clone!(
#[weak(rename_to = window)]
self,
move |_| {
window.new_task();
}
));
// Setup callback for clicking (and the releasing) the icon of the entry
self.imp().entry.connect_icon_release(clone!(
#[weak(rename_to = window)]
self,
move |_, _| {
window.new_task();
}
));
}
fn new_task(&self) {
// Get content from entry and clear it
let buffer = self.imp().entry.buffer();
let content = buffer.text().to_string();
if content.is_empty() {
return;
}
buffer.set_text("");
// Add new task to model
let task = TaskObject::new(false, content);
self.tasks().append(&task);
}
fn setup_factory(&self) {
// Create a new factory
let factory = SignalListItemFactory::new();
// Create an empty `TaskRow` during setup
factory.connect_setup(move |_, list_item| {
// Create `TaskRow`
let task_row = TaskRow::new();
list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.set_child(Some(&task_row));
});
// Tell factory how to bind `TaskRow` to a `TaskObject`
factory.connect_bind(move |_, list_item| {
// Get `TaskObject` from `ListItem`
let task_object = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.item()
.and_downcast::<TaskObject>()
.expect("The item has to be an `TaskObject`.");
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.bind(&task_object);
});
// Tell factory how to unbind `TaskRow` from `TaskObject`
factory.connect_unbind(move |_, list_item| {
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.unbind();
});
// Set the factory of the list view
self.imp().tasks_list.set_factory(Some(&factory));
}
}In Window::setup_callbacks we connect to the “activate” signal of the entry.
This signal is triggered when we press the enter key in the entry.
Then a new TaskObject with the content will be created and appended to the model.
Finally, the entry will be cleared.
Filename: listings/todo/1/window/mod.rs
mod imp;
use glib::{Object, clone};
use gtk::subclass::prelude::*;
use gtk::{Application, NoSelection, SignalListItemFactory, gio, glib};
use gtk::{ListItem, prelude::*};
use crate::task_object::TaskObject;
use crate::task_row::TaskRow;
glib::wrapper! {
pub struct Window(ObjectSubclass<imp::Window>)
@extends gtk::ApplicationWindow, gtk::Window, gtk::Widget,
@implements gio::ActionGroup, gio::ActionMap, gtk::Accessible, gtk::Buildable,
gtk::ConstraintTarget, gtk::Native, gtk::Root, gtk::ShortcutManager;
}
impl Window {
pub fn new(app: &Application) -> Self {
// Create new window
Object::builder().property("application", app).build()
}
fn tasks(&self) -> gio::ListStore {
// Get state
self.imp()
.tasks
.borrow()
.clone()
.expect("Could not get current tasks.")
}
fn setup_tasks(&self) {
// Create new model
let model = gio::ListStore::new::<TaskObject>();
// Get state and set model
self.imp().tasks.replace(Some(model));
// Wrap model with selection and pass it to the list view
let selection_model = NoSelection::new(Some(self.tasks()));
self.imp().tasks_list.set_model(Some(&selection_model));
}
fn setup_callbacks(&self) {
// Setup callback for activation of the entry
self.imp().entry.connect_activate(clone!(
#[weak(rename_to = window)]
self,
move |_| {
window.new_task();
}
));
// Setup callback for clicking (and the releasing) the icon of the entry
self.imp().entry.connect_icon_release(clone!(
#[weak(rename_to = window)]
self,
move |_, _| {
window.new_task();
}
));
}
fn new_task(&self) {
// Get content from entry and clear it
let buffer = self.imp().entry.buffer();
let content = buffer.text().to_string();
if content.is_empty() {
return;
}
buffer.set_text("");
// Add new task to model
let task = TaskObject::new(false, content);
self.tasks().append(&task);
}
fn setup_factory(&self) {
// Create a new factory
let factory = SignalListItemFactory::new();
// Create an empty `TaskRow` during setup
factory.connect_setup(move |_, list_item| {
// Create `TaskRow`
let task_row = TaskRow::new();
list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.set_child(Some(&task_row));
});
// Tell factory how to bind `TaskRow` to a `TaskObject`
factory.connect_bind(move |_, list_item| {
// Get `TaskObject` from `ListItem`
let task_object = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.item()
.and_downcast::<TaskObject>()
.expect("The item has to be an `TaskObject`.");
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.bind(&task_object);
});
// Tell factory how to unbind `TaskRow` from `TaskObject`
factory.connect_unbind(move |_, list_item| {
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.unbind();
});
// Set the factory of the list view
self.imp().tasks_list.set_factory(Some(&factory));
}
}The list elements for the gtk::ListView are produced by a factory.
Before we move on to the implementation, let’s take a step back and think about which behavior we expect here.
content_label of TaskRow should follow content of TaskObject.
We also want completed_button of TaskRow follow completed of TaskObject.
This could be achieved with expressions similar to what we did in the lists chapter.
However, if we toggle the state of completed_button of TaskRow, completed of TaskObject should change too.
Unfortunately, expressions cannot handle bidirectional relationships.
This means we have to use property bindings.
We will need to unbind them manually when they are no longer needed.
We will create empty TaskRow objects in the “setup” step in Window::setup_factory and deal with binding in the “bind” and “unbind” steps.
Filename: listings/todo/1/window/mod.rs
mod imp;
use glib::{Object, clone};
use gtk::subclass::prelude::*;
use gtk::{Application, NoSelection, SignalListItemFactory, gio, glib};
use gtk::{ListItem, prelude::*};
use crate::task_object::TaskObject;
use crate::task_row::TaskRow;
glib::wrapper! {
pub struct Window(ObjectSubclass<imp::Window>)
@extends gtk::ApplicationWindow, gtk::Window, gtk::Widget,
@implements gio::ActionGroup, gio::ActionMap, gtk::Accessible, gtk::Buildable,
gtk::ConstraintTarget, gtk::Native, gtk::Root, gtk::ShortcutManager;
}
impl Window {
pub fn new(app: &Application) -> Self {
// Create new window
Object::builder().property("application", app).build()
}
fn tasks(&self) -> gio::ListStore {
// Get state
self.imp()
.tasks
.borrow()
.clone()
.expect("Could not get current tasks.")
}
fn setup_tasks(&self) {
// Create new model
let model = gio::ListStore::new::<TaskObject>();
// Get state and set model
self.imp().tasks.replace(Some(model));
// Wrap model with selection and pass it to the list view
let selection_model = NoSelection::new(Some(self.tasks()));
self.imp().tasks_list.set_model(Some(&selection_model));
}
fn setup_callbacks(&self) {
// Setup callback for activation of the entry
self.imp().entry.connect_activate(clone!(
#[weak(rename_to = window)]
self,
move |_| {
window.new_task();
}
));
// Setup callback for clicking (and the releasing) the icon of the entry
self.imp().entry.connect_icon_release(clone!(
#[weak(rename_to = window)]
self,
move |_, _| {
window.new_task();
}
));
}
fn new_task(&self) {
// Get content from entry and clear it
let buffer = self.imp().entry.buffer();
let content = buffer.text().to_string();
if content.is_empty() {
return;
}
buffer.set_text("");
// Add new task to model
let task = TaskObject::new(false, content);
self.tasks().append(&task);
}
fn setup_factory(&self) {
// Create a new factory
let factory = SignalListItemFactory::new();
// Create an empty `TaskRow` during setup
factory.connect_setup(move |_, list_item| {
// Create `TaskRow`
let task_row = TaskRow::new();
list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.set_child(Some(&task_row));
});
// Tell factory how to bind `TaskRow` to a `TaskObject`
factory.connect_bind(move |_, list_item| {
// Get `TaskObject` from `ListItem`
let task_object = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.item()
.and_downcast::<TaskObject>()
.expect("The item has to be an `TaskObject`.");
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.bind(&task_object);
});
// Tell factory how to unbind `TaskRow` from `TaskObject`
factory.connect_unbind(move |_, list_item| {
// Get `TaskRow` from `ListItem`
let task_row = list_item
.downcast_ref::<ListItem>()
.expect("Needs to be ListItem")
.child()
.and_downcast::<TaskRow>()
.expect("The child has to be a `TaskRow`.");
task_row.unbind();
});
// Set the factory of the list view
self.imp().tasks_list.set_factory(Some(&factory));
}
}Binding properties in TaskRow::bind works just like in former chapters.
The only difference is that we store the bindings in a vector.
This is necessary because a TaskRow will be reused as you scroll through the list.
That means that over time a TaskRow will need to bound to a new TaskObject and has to be unbound from the old one.
Unbinding will only work if it can access the stored glib::Binding.
Filename: listings/todo/1/task_row/mod.rs
mod imp;
use glib::Object;
use gtk::prelude::*;
use gtk::subclass::prelude::*;
use gtk::{glib, pango};
use pango::{AttrInt, AttrList};
use crate::task_object::TaskObject;
glib::wrapper! {
pub struct TaskRow(ObjectSubclass<imp::TaskRow>)
@extends gtk::Box, gtk::Widget,
@implements gtk::Accessible, gtk::Buildable, gtk::ConstraintTarget, gtk::Orientable;
}
impl Default for TaskRow {
fn default() -> Self {
Self::new()
}
}
impl TaskRow {
pub fn new() -> Self {
Object::builder().build()
}
pub fn bind(&self, task_object: &TaskObject) {
// Get state
let completed_button = self.imp().completed_button.get();
let content_label = self.imp().content_label.get();
let mut bindings = self.imp().bindings.borrow_mut();
// Bind `task_object.completed` to `task_row.completed_button.active`
let completed_button_binding = task_object
.bind_property("completed", &completed_button, "active")
.bidirectional()
.sync_create()
.build();
// Save binding
bindings.push(completed_button_binding);
// Bind `task_object.content` to `task_row.content_label.label`
let content_label_binding = task_object
.bind_property("content", &content_label, "label")
.sync_create()
.build();
// Save binding
bindings.push(content_label_binding);
// Bind `task_object.completed` to `task_row.content_label.attributes`
let content_label_binding = task_object
.bind_property("completed", &content_label, "attributes")
.sync_create()
.transform_to(|_, active| {
let attribute_list = AttrList::new();
if active {
// If "active" is true, content of the label will be strikethrough
let attribute = AttrInt::new_strikethrough(true);
attribute_list.insert(attribute);
}
Some(attribute_list.to_value())
})
.build();
// Save binding
bindings.push(content_label_binding);
}
pub fn unbind(&self) {
// Unbind all stored bindings
for binding in self.imp().bindings.borrow_mut().drain(..) {
binding.unbind();
}
}
}TaskRow::unbind takes care of the cleanup.
It iterates through the vector and unbinds each binding.
In the end, it clears the vector.
Filename: listings/todo/1/task_row/mod.rs
mod imp;
use glib::Object;
use gtk::prelude::*;
use gtk::subclass::prelude::*;
use gtk::{glib, pango};
use pango::{AttrInt, AttrList};
use crate::task_object::TaskObject;
glib::wrapper! {
pub struct TaskRow(ObjectSubclass<imp::TaskRow>)
@extends gtk::Box, gtk::Widget,
@implements gtk::Accessible, gtk::Buildable, gtk::ConstraintTarget, gtk::Orientable;
}
impl Default for TaskRow {
fn default() -> Self {
Self::new()
}
}
impl TaskRow {
pub fn new() -> Self {
Object::builder().build()
}
pub fn bind(&self, task_object: &TaskObject) {
// Get state
let completed_button = self.imp().completed_button.get();
let content_label = self.imp().content_label.get();
let mut bindings = self.imp().bindings.borrow_mut();
// Bind `task_object.completed` to `task_row.completed_button.active`
let completed_button_binding = task_object
.bind_property("completed", &completed_button, "active")
.bidirectional()
.sync_create()
.build();
// Save binding
bindings.push(completed_button_binding);
// Bind `task_object.content` to `task_row.content_label.label`
let content_label_binding = task_object
.bind_property("content", &content_label, "label")
.sync_create()
.build();
// Save binding
bindings.push(content_label_binding);
// Bind `task_object.completed` to `task_row.content_label.attributes`
let content_label_binding = task_object
.bind_property("completed", &content_label, "attributes")
.sync_create()
.transform_to(|_, active| {
let attribute_list = AttrList::new();
if active {
// If "active" is true, content of the label will be strikethrough
let attribute = AttrInt::new_strikethrough(true);
attribute_list.insert(attribute);
}
Some(attribute_list.to_value())
})
.build();
// Save binding
bindings.push(content_label_binding);
}
pub fn unbind(&self) {
// Unbind all stored bindings
for binding in self.imp().bindings.borrow_mut().drain(..) {
binding.unbind();
}
}
}That was it, we created a basic To-Do app! We will extend it with additional functionality in the following chapters.